 Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications
Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications
Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications
Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications
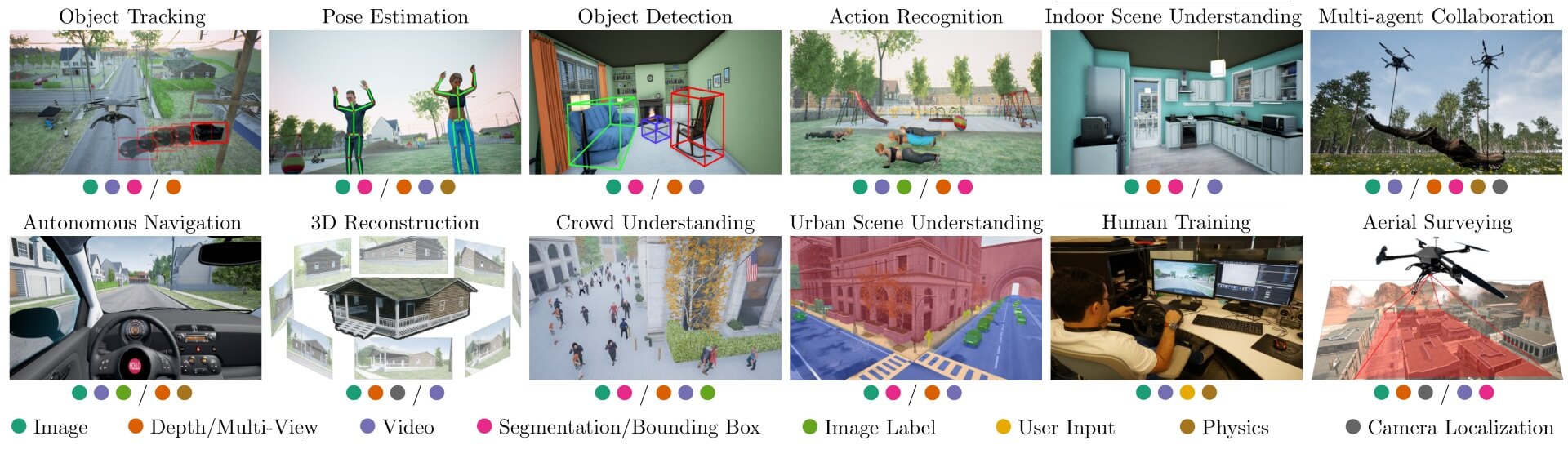
We present a photo-realistic training and evaluation simulator [Sim4CV](https://sim4cv.org/) with extensive applications across various fields of computer vision. Built on top of the Unreal Engine, the simulator integrates full featured physics based cars, unmanned aerial vehicles (UAVs), and animated human actors in diverse urban and suburban 3D environments. We demonstrate the versatility of the simulator with two case studies: autonomous UAV-based tracking of moving objects and autonomous driving using supervised learning. The simulator fully integrates both several state-of-the-art tracking algorithms with a benchmark evaluation tool and a deep neural network (DNN) architecture for training vehicles to drive autonomously. It generates synthetic photo-realistic datasets with automatic ground truth annotations to easily extend existing real-world datasets and provides extensive synthetic data variety through its ability to reconfigure synthetic worlds on the fly using an automatic world generation tool.