 A Benchmark and Simulator for UAV Tracking
A Benchmark and Simulator for UAV Tracking
A Benchmark and Simulator for UAV Tracking
A Benchmark and Simulator for UAV Tracking
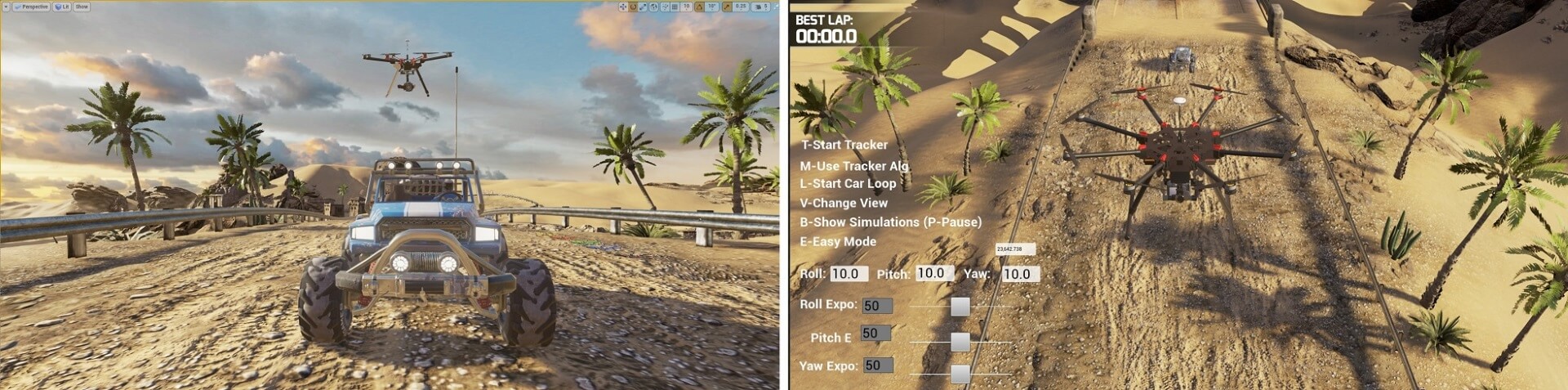
In this paper, we propose a new aerial video dataset and benchmark for low altitude UAV target tracking, as well as, a photorealistic UAV simulator that can be coupled with tracking methods. Our benchmark provides the first evaluation of many state-of-the-art and popular trackers on 123 new and fully annotated HD video sequences captured from a low-altitude aerial perspective. Among the compared trackers, we determine which ones are the most suitable for UAV tracking both in terms of tracking accuracy and run-time. The simulator can be used to evaluate tracking algorithms in real-time scenarios before they are deployed on a UAV in the field, as well as, generate synthetic but photo-realistic tracking datasets with automatic ground truth annotations to easily extend existing real-world datasets. Both the benchmark and simulator are made publicly available to the vision community on our website to further research in the area of object tracking from UAVs.