 Zero-Shot Transfer of Haptics-based Object Insertion Policies
Zero-Shot Transfer of Haptics-based Object Insertion Policies
Zero-Shot Transfer of Haptics-based Object Insertion Policies
Zero-Shot Transfer of Haptics-based Object Insertion Policies
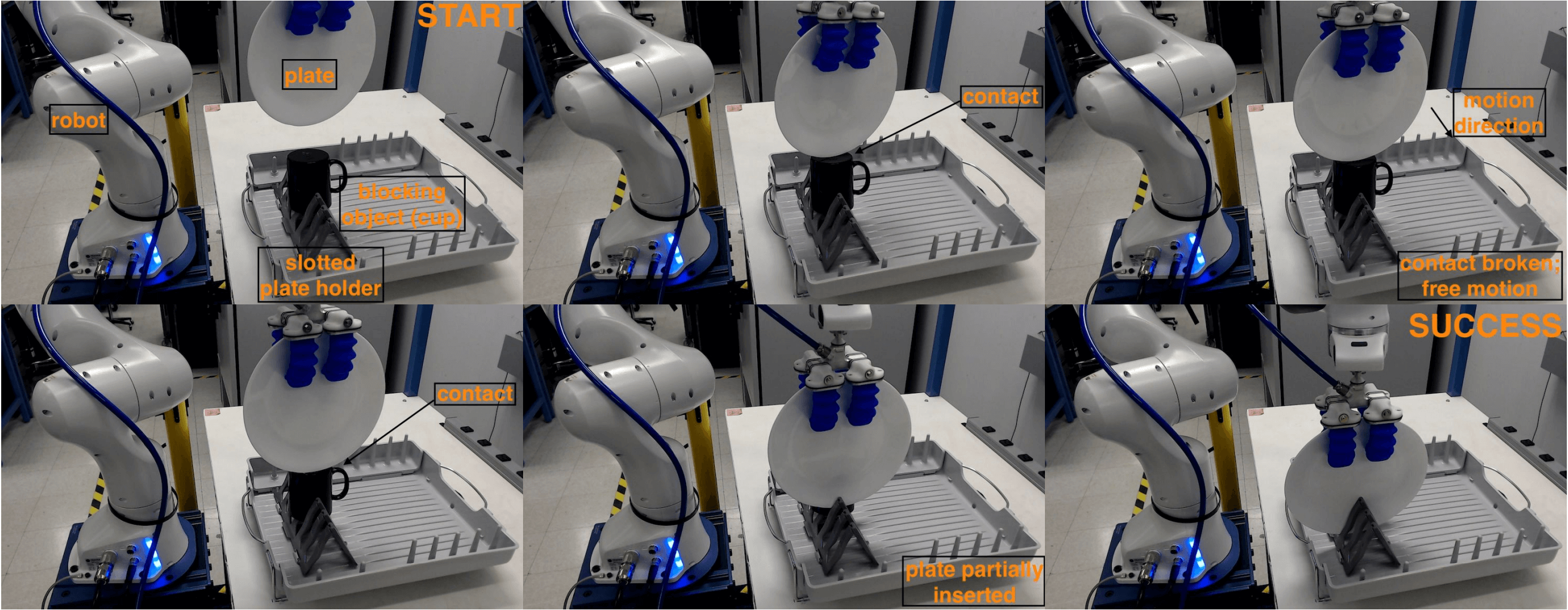
Humans naturally exploit haptic feedback during contact-rich tasks like loading a dishwasher or stocking a bookshelf. Current robotic systems focus on avoiding unexpected contact, often relying on strategically placed environment sensors. Recently, contact-exploiting manipulation policies have been trained in simulation and deployed on real robots. However, they require some form of real-world adaptation to bridge the sim-to-real gap, which might not be feasible in all scenarios. In this paper we train a contact-exploiting manipulation policy in simulation for the contact-rich household task of loading plates into a slotted holder, which transfers without any fine-tuning to the real robot. We investigate various factors necessary for this zero-shot transfer, like time delay modeling, memory representation, and domain randomization. Our policy transfers with minimal sim-to-real gap and significantly outperforms heuristic and learnt baselines. It also generalizes to plates of different sizes and weights.